
東京大学 情報理工学系研究科の博士課程学生です。マシンインテリジェンス研究室と理研AIP ロボットラーニングチームに所属しており, 原田達也教授と長隆之チームディレクターの指導を受けています。
大規模並列環境におけるスケーラブルな強化学習アルゴリズムの開発や, 多指ハンド物体操作の学習に注目しています. 関連研究は ICLR 2026 に採択されました。
2025年夏にはスイス連邦工科大学チューリッヒ校のSoft Robotics Labで多指ハンド物体操作のプロジェクトに取り組む機会に恵まれました。東京大学で修士, 京都大学で学士を取得し, 2021年からはSony CSL - Kyotoで暦本純一教授のリサーチアシスタントをしています。
🎉 最新論文 🎉
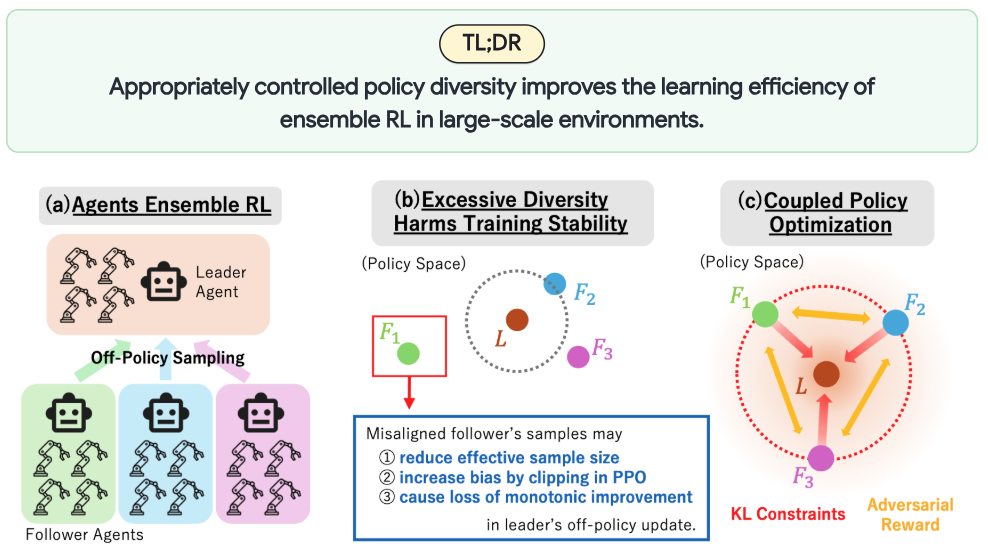
Rethinking Policy Diversity in Ensemble Policy Gradient in Large-Scale Reinforcement Learning
ICLR 2026 @ Rio de Janeiro (Poster)
大規模並列環境における複数方策を用いた強化学習において, 方策の多様性が学習に与える影響を明らかにし, 方策群の多様性を適切に制御することで, 物体操作タスクにおいて高いサンプル効率と最終性能を示す手法を提案しました.
学歴
- 2026.04 - 現在: 東京大学大学院情報理工学研究科 知能機械情報学専攻 博士課程 原田達也教授
- 2024.04 - 2026.03: 東京大学大学院情報理工学研究科 知能機械情報学専攻 修士(情報理工学) 原田達也教授・長隆之准教授
- 2019.04 - 2024.03: 京都大学 工学部・電気電子工学科 土井俊哉教授
留学経験
- 2024.07 - 2026.09: スイス連邦工科大学チューリッヒ校 ETH Robotics Summer Fellowship 2025, Prof. Robert Katzschmann, 採択率3.1%
- 2022.09 - 2023.06: ブリストル大学 / ブリストルロボティクス研究所 Exchange student & visiting researcher, Prof. Jonathan Rossiter
ギャラリー








インターンシップ
-
2025.11 - 現在: 理化学研究所 革新知能統合研究センター
ロボットラーニングチーム(長 隆之) -
2021.02 - 現在: 株式会社ソニーコンピュータサイエンス研究所
暦本純一副所長のリサーチアシスタントとして, 京都リサーチで ①三次元再構成のためのデータ収集支援システムの研究(2025~), ②街中での三次元再構成の研究(2023~2024), ③透明度が変化するインタラクティブな建築要素の研究(2022~2023) - 2024.07 - 2025.11: 株式会社 FingerVision 自動食器識別・洗浄ロボット向けの画像認識システムの開発(業務委託)
-
2024.05 - 2024.06: 株式会社 Preferred Networks
パートタイム・エンジニア, ロボット学習 -
2019.10 - 2021.09: マッスル株式会社
パートタイムエンジニア, 安価なファッション展示用マネキンロボットの開発. 2022年4月から兵庫県立美術館で開催された「コシノ・ヒロコ展」で採用.
その他
-
2025.06 - 2026.03: 2025年度 未踏IT人材発掘・育成事業 採択
自己表現のためのモジュール型ソーシャルロボットの開発基盤の構築, 横井総太朗, 四反田直樹, 松尾健登. 採択率9.3%. スーパークリエーターに認定.
受賞・認定など
メディア
- 2026-06-10: 理研が高効率の強化学習技術、Sim-to-real想定 既存手法で解けない難問にも有効 [Link]日経ロボティクス 7月号
研究費
- BOOST NAIS: Next-generation AI for Intelligent Society 2026~2028年度, 研究費(54万円/年)
- GCL 令和7年度 自主企画研究・活動費 企画B 2025年度, 50万円